Needle Steering
In medicine, needles are frequently used to deliver treatments to subsurface targets or to take tissue samples from the inside of an organ.
Current clinical practice is to insert needles under image guidance or with haptic feedback, although that may involve reinsertions and adjustments since the needle and its interaction with the tissue during insertion cannot be completely controlled.
(Automated) needle steering could in theory improve the accuracy with which a target is reached and thus reduce surgical traumata especially for minimally invasive procedures, e.g., brachytherapy or biopsy.
In our research project we are working on a new method to navigate flexible needles with a bevel tip to reach fixed targets in tissue and face the challenge of uncertainty of needle motion due to tissue deformation, inhomogeneities, and a number of other control and environment parameters during needle intervention.
We follow the attempt to employ timed games for automatic needle navigation. Our goal is to implement a workflow for online strategy synthesis to steer automatically a flexible needle through tissue and adapt needle motion online in case of unexpected events so that the needle always reaches the target regardless of how the tissue behaves.
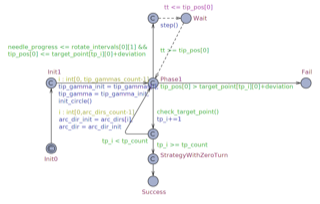
Timed game automaton of needle-tissue interaction.
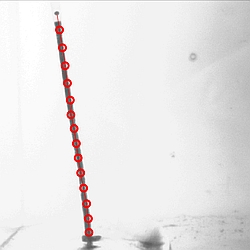
Motion of a flexible needle with bevel tip through tissue.
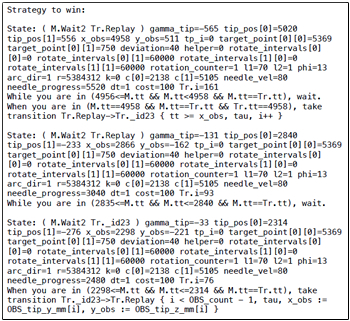
Our needle navigation strategy to reach a fixed target with a flexible needle.