Search and Optimization
We apply planning and optimization approaches in several research areas, including treatment planning for radiation therapy and brachytherapy, as well as optimization of robot configurations and movements.
Radiation therapy presents an effective and non-invasive option for cancer treatment. However, ionizing radiation can be harmful and the effects and side effects of irradiation need to be balanced. We also examine robotic biopsy, which similarly requires careful planning for safe and time efficient tissue sampling.
We develop algorithms and systems involving heuristic optimization, mathematical programming, and machine learning to identify the optimal trade-off between the various clinical objectives.
Selected publications
- S. Gerlach, F.-A. Siebert, A. Schlaefer (2023). Robust stochastic optimization of needle configurations for robotic HDR prostate brachytherapy. Medical Physics. 1-12 [Abstract]
[doi][www][BibTex]
- S. Gerlach, T. Hofmann, C. Fürweger, A. Schlaefer (2022). AI-based optimization for US-guided radiation therapy of the prostate. International Journal of Computer Assisted Radiology, Surgery. [Abstract]
[doi][www][BibTex]
-
S. Gerlach, C. Fürweger, T. Hofmann, A. Schlaefer
(2020).
Feasibility and analysis of CNN-based candidate beam generation for robotic radiosurgery.
Medical Physics.
47
(9),
3806-3815.
[Abstract][doi][www][BibTex]
-
M. Schlüter, S. Gerlach, C. Fürweger, A. Schlaefer
(2019).
Analysis and Optimization of the Robot Setup for Robotic-Ultrasound-Guided Radiation Therapy.
International Journal of Computer Assisted Radiology and Surgery.
14
(8),
1379-1387.
[Abstract][doi][BibTex]
-
M. Schlüter, C. Fürweger, A. Schlaefer
(2019).
Optimizing Configurations for 7-DoF Robotic Ultrasound Guidance in Radiotherapy of the Prostate.
Annual International Conference of the IEEE Engineering in Medicine and Biology Society
6983-6986.
[Abstract][doi][BibTex]
-
S. Gerlach, I. Kuhlemann, F. Ernst, C. Fürweger, A. Schlaefer
(2017).
Impact of robotic ultrasound image guidance on plan quality in SBRT of the prostate.
The British Journal of Radiology.
90
(1078),
20160926.
[Abstract][doi][www][BibTex]
-
A. Schlaefer, A. Schweikard,
(2008).
Stepwise multi-criteria optimization for robotic radiosurgery.
Med Phys.
35
(5),
2094-2103.
[Abstract][doi][BibTex]
3D Inverse Planning
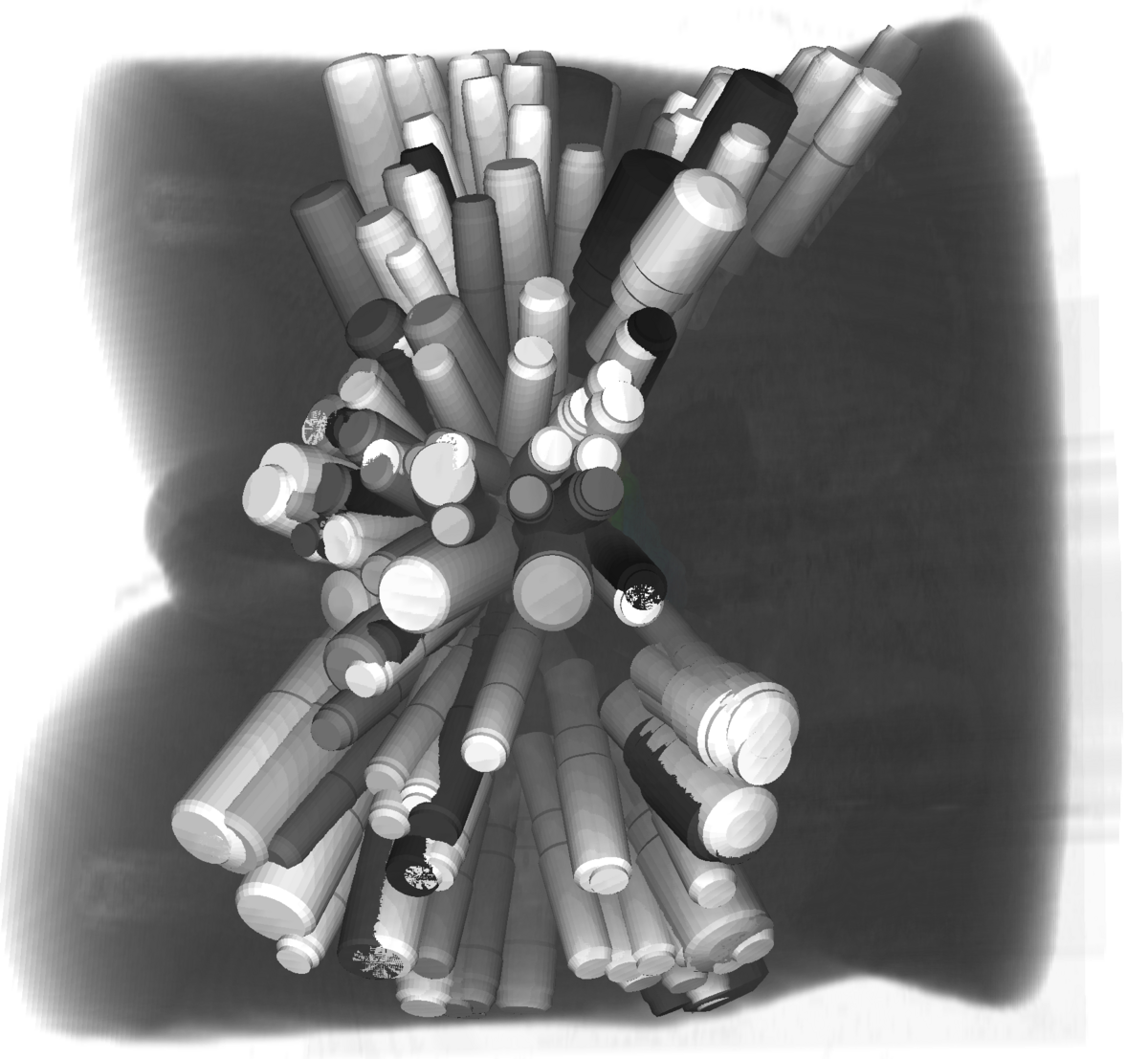
We are interested in multi-criteria treatment planning for robotic radiosurgery. In this area we study different methods for dose application including the CyberKnife, ZAP-X, or Brachytherapy. With our in-house developed treatment planning system which is based on workflows, we have a flexible setup to study different planning approaches. We have previously studied the effect of the spatial beam arrangement on the achievable dose distribution, and how Deep Learning can be used to efficiently find a suitable set of treatment beams.
Planning for Motion Compensated Treatments for RT and Brachytherapy
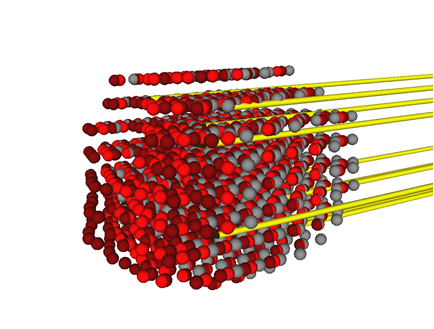
The consideration of target motion and deformation is challenging when planning and delivering the treatment for radiation therapy and brachytherapy. However, it is crucial to provide an accurate treatment in order to achieve the clinical goals. This issue can be addressed in 4D and stochastic planning problems.
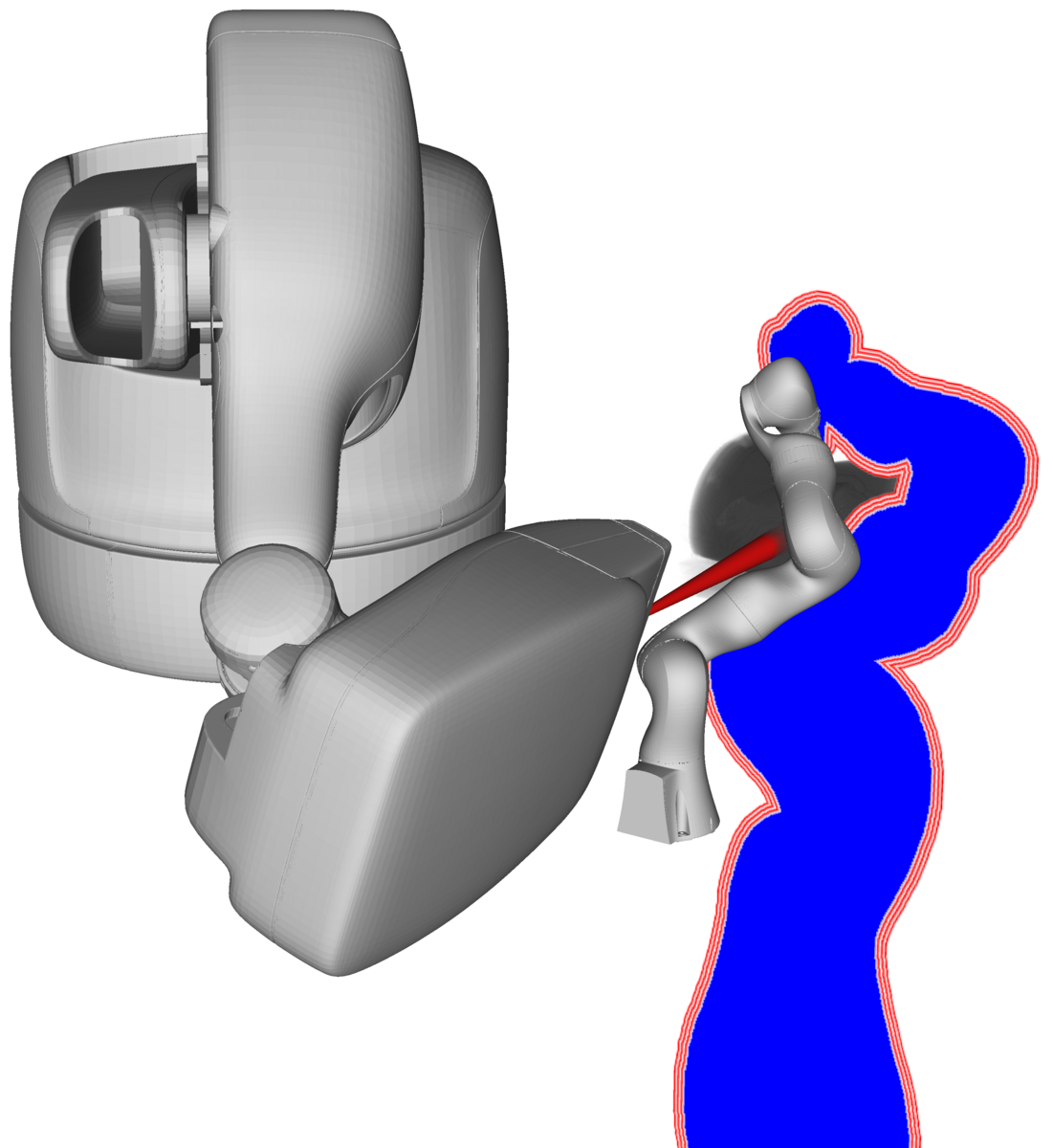
Another challenge is the inclusion of imaging to detect the motion itself during treatment.For example, when a robot is used for ultrasound examination of the abdomen during a radiation therapy fraction, radiation delivery is limited, i.e., the beams may not collide or pass through the robot or ultrasound probe. We study the effects of imaging devices on the treatment plan quality and develop methods for integrating ultrasound and beam delivery.
Optimization of Robot Configurations for Clinical Usage
Integrating robots into clinical workflows is often challenge, e.g. for robotic ultrasound imaging during radiation therapy treatment or for robotic biopsy sampling. While robots can offer several advantages for medical applications, the robot's interference in the clincial workflow should be minimal. We apply optimization algorithms to find configurations and positions of robots which allow for their optimal integration.
Contact
- Alexander Schlaefer (schlaefer(at)tuhh.de)